
משתמש:קובי.ו/Describing function
בתורת הבקרה, שיטת הפונקציה המתארת, באנגלית decribing function (DF), פותחה על ידי ניקולאי מיטרופנוביץ' קרילוב וניקולאי בוגוליובוב בשנות ה-30 [1] , והורחבה בהמשך, DF הינה קירוב לניתוח חלק ממערכות בקרה לא-לינארית. DF תלויה במשרעת הכניסה. לעומת פונקציית התמסורת של מערכת LTI שהיא בהגדרתה ליניארית, ועל כן בהגדרה לא תלוייה בערך משרעת הכניסה. DF נמצאת בשימוש נרחב בתור כלי מתמטי סטנדרטי לניתוח limit cycles ובקרת חוג סגור .
השיטה[עריכת קוד מקור | עריכה]
ניתן לחשוב על משוב בעל אזור לא רציף (למשל משווה, מגבר בעל רוויה) שמחובר למערכת ליניארית יציבה איטית. אם כך החלק הרציף באיבר הלא לינראי יהיה תלוי באמפליטודת הכניסה של המערכת הליניארית. כך שכאשר אמפליטודת הפלט של המערכת הליניארית משתנה וקטנה, ייתכן

שהמערכת הלא לינראית תעבור לאזור רציף אחר (כמו במשווה מעבר מאזור ה+ ל-). מעבר זה בין אחד למשנהו יכול ליצור תנודות מחזוריות.
מודל הDF מנסה לחזות את המאפיינים שיהיו לאותן התנודות (למשל, התדר הבסיסי שלהן) על ידי הנחה שהמערכת האיטית שמחוברת למערכת הלא לינראית פועלת כמו מסנן LPF או BPF כך שהיא תרכז את כל האנרגיה סביב תדר בודד. אף אם בצורת גל המוצא יהיו כמה שינויים, השיטה עדיין תוכל לספק אינטואיציה לגבי מאפיינים כמו תדר ואמפליטודה אפשרית..
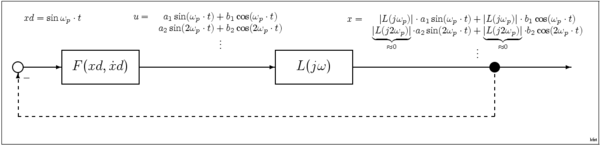
בעזרת ההנחה בדבר הLPF, ניתן יהיה לתאר את תגובת המערכת על ידי צורת גל סינוסואידאלית ; במקרה זה המערכת תאופיין במה שמכונה SIDF (sine input describing function).

תגובת המערכת לכניסת סינוס בעל תדר ומשרעת A.

. SIDF שונה מפונקציית התמסורת לאפיון מערכות לינאריות .

לעיתים במערכות אלו כאשר הקלט הינו סינוס, הפלט יהיה סינוס בעל תדר דומה אך בעל משערת שונה והזזת פאזה לפי האפיון .
כך מערכות רבות יהיו בעל קירוב זה כך שלמרות שהתגובה לגל סינוס לא תהיה סינוס טהור, עדיין רוב אנרגיית המוצא תהיה באותו תדר הקלט - . הסיבה לכך היא שמערכות אלה עשויות להחזיק במאפיינים פנימיים של LPF או BPF, כך ש"שאר" ההרמוניות תחלשנה באופן טבעי, או משום הוספת מסננים חיצוניים למטרה זו.
אזהרות[עריכת קוד מקור | עריכה]
למרות ששיטת הפונקציה המתארת יכולה להפיק תוצאות מדויקות למדי עבור מערכות רבות, היא עלולה להיכשל במערכות אחרות. לדוגמה, השיטה עלולה להיכשל כאשר המערכת מסננת הרמוניות גבוהות יותר של האי-לינאריות
- ^ Krylov, N. M.; N. Bogoliubov (1943). Introduction to Nonlinear Mechanics. Princeton, US: Princeton Univ. Press. ISBN 0691079854. אורכב מ-המקור ב-2013-06-20.