
אופטימיזציית הגחלילית
אופטימיזציית הגחלילית (באנגלית: Firefly optimization) היא שיטה מטה-היוריסטית מתחום הבינה המלאכותית לאופטימיזציה של פונקציות המקבלת את השראתה מהתנהגותן של גחליליות בטבע. השיטה הוצעה על ידי קסין שי יאנג (אנ') בשנת 2008, והיא שימושית בתחומים רבים, לרבות בעיבוד תמונה, תזמון תהליכים, ניתוח מבני של חלבונים, קינימטיקה הפוכה ועוד. סיבוכיות האלגוריתם היא , כאשר הוא מספר האיטרציות שמבצע האלגוריתם.


הקדמה[עריכת קוד מקור | עריכה]
בעיית אופטימיזציה[עריכת קוד מקור | עריכה]

 ערך מורחב – אופטימיזציה (מתמטיקה)
ערך מורחב – אופטימיזציה (מתמטיקה)
בעיית אופטימיזציה היא בעיה מתמטית העוסקת במציאת ערך אופטימלי (מינימלי או מקסימלי) עבור פונקציה נתונה, תחת אילוצים נתונים. כל בעיית אופטימיזציה ניתנת לתיאור ע"י:

כאשר היא קבוצת הפתרונות האפשריים לבעיה. הוא פתרון לבעיה אם ורק אם מתקיים וגם לכל .





הגחליליות בטבע[עריכת קוד מקור | עריכה]
- ערך מורחב – גחליליות
הגחלילית (שם מדעי: Lampyridae) היא זן של חיפושית לילית. הגחלילית משתמשת בהבזקי אור כאמצעי תקשורת עם בני המין השני במהלך תהליך החיזור. זכר גחלילית הנמצא בתהליך החיזור מפיק הבזקי אור בזמן מעופו. נקבת הגחלילית הנענית לחיזור מפיקה גם היא אותות מיוחדים על מנת לסמן לזכר המחזר את מיקומה. עוצמתם ותדירותם של הבזקי האור הזכריים מעידים על האיכות הגנטית שלו, ומשפיעים על תגובתה של הנקבה. הבזקי האור נוצרים בתהליך הביולומינסנציה המבוקר בעיקר על ידי החלבון לוציפראז.
ניתן לראות את תהליך החיזור הכולל של נחיל גחליליות כמעין תהליך חיפוש המשלב אקראיות, חיפוש מקומי וחיפוש גלובלי (אלגוריתם מטה-היוריסטי).
האלגוריתם[עריכת קוד מקור | עריכה]
תיאור[עריכת קוד מקור | עריכה]
בהינתן מספר איטרציות מרבי , ניתן לתאר את האלגוריתם בצורה הכללית הבאה:

- אתחל אוכלוסייה אקראית של גחליליות על פני פונקציית מטרה ב- ממדים, כאשר היא עוצמת ההארה של גחלילית .
- לכל זוג גחליליות , אם גחלילית בהירה יותר מגחלילית , הזז את גחלילית לכיוון גחלילית על פי משוואת התנועה: כאשר מייצג נקודה בזמן, הן מיקום הגחליליות בהתאמה, הוא מקדם אקראיות ו- הוא וקטור מספרים אקראיים המתפלגים נורמלית בזמן . אחרת, הזז את הגחלילית באופן אקראי.
- עדכן את תאורת הגחליליות ואת מידת המשיכה בין הגחליליות ע"פ המיקומים והמרחקים החדשים שהתקבלו.
- חזור על שלבים (2) ו- (3) למשך פעמים. בסיום, הגחלילית המוארת ביותר היא קירוב לפתרון הבעיה.








+\alpha _{t}{\boldsymbol {\epsilon }}_{t}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/482bdd9e7eb65f53c300071e26dc0a1c55449792)




בבעיות למציאת מקסימום, יתקיים ובבעיות למציאת מינימום יתקיים .


פסאודו - קוד[עריכת קוד מקור | עריכה]
Begin Generate a random population of n fireflies x_1, x_2, ..., x_n While (t < MaxGeneration) update distances update lights intensities update attractiveness for i = 1 : n for j = 1 : n if (I_j > I_i), move firefly i to j end if end for j end for i set s as the firefly with the optimal light intensity. end while return s as solution end
רקע תאורטי[עריכת קוד מקור | עריכה]
מודל מתמטי[עריכת קוד מקור | עריכה]
האלגוריתם מבוסס על אידיאליזצית תכונות ההארה של מאור הגחליליות. הגחלילית, בקרב מרבית זני הגחליליות בטבע, משתמשת בהארה על מנת למשוך אליה פרטי להקה אחרים לצורכי זיווג. התכונות האידיאליות הן כדלקמן:
- כל גחלילית נמשכת לגחליליות אחרות, ללא קשר למינן.
- מידת המשיכה של גחלילית כלפי גחלילית היא ביחס ישר למידת ההארה של גחלילית (אנלוגיה להתנהגותן הטבעית של הגחליליות).
- עוצמת האור שגחלילית קולטת מגחלילית היא ביחס הפוך למרחק בין גחלילית לבין גחלילית (אנלוגיה לחוק ריבוע המרחק ההופכי, לפיו עוצמת האור נחלשת ביחס ריבועי הפוך למרחק ממקור האור).
- עוצמת ההארה של הגחלילית נקבעת ע"פ ערכה של פונקציית המטרה .


על פי תכונות (2) ו- (3), ניתן לגזור את משוואת המשיכה בין שתי גחליליות, כפונקציה מעריכית של המרחק ביניהן: כאשר הוא קבוע, הוא מקדם התפשטות האור באוויר, היא עוצמת המשיכה בין שתי גחליליות ו- הוא המרחק הגאומטרי בין שתי הגחליליות. תנועתה של גחלילית מושפעת מגחלילית בהירה יותר באופן הבא:







כאשר מייצג נקודה בזמן, הן מיקום הגחליליות בהתאמה, הוא מקדם אקראיות ו- הוא וקטור מספרים אקראיים המתפלגים נורמלית בזמן . עבור מתקבלת תנועה אקראית פשוטה, ועבור מתקבלת משוואת תנועת חלקיקים של אופטימיזציית הנחיל.


חלוקה אוטומטית[עריכת קוד מקור | עריכה]
במקרים רבים, אלגוריתם הגחליליות יעיל יותר מאלגוריתמים רבים אחרים מתחום בינת הנחיל. סיבה עיקרית לכך היא תופעת החלוקה האוטומטית. האלגוריתם מבוסס על כך שאטרקטיביות של פתרון פוחתת עם עליית המרחק, ולכן, נוצר מצב שבו האוכלוסייה מופרדת באופן אוטומטי לתתי-קבוצות, כאשר כל תת-קבוצה מרוכזת סביב אופטימום מקומי שונה. עבור אוכלוסייה הגדולה מאוד ממספר מוקדי האופטימום המקומיים, חלוקה זו מאפשרת למצוא את כל המוקדים המקומיים בו-זמנית. מבחינה מתמטית, מאפיין את המרחק הממוצע בין שתי קבוצות גחליליות סמוכות. מכאן, כל אוכלוסייה נחלקת לתתי קבוצות סמוכות בעלות מרחק ממוצע קבוע. עובדה זו מאפשרת התמודדות עם בעיות שאינן ליניאריות.


קל לזהות את תופעת החלוקה האוטומטית בהרצת האלגוריתם על הפונקציה התלת-מימדית הבאה:

לפונקציה ישנן ארבע נקודות מקסימום . האלגוריתם מאפשר את מציאת הקטבים על ידי גחליליות ו- איטרציות. הסכימה הבאה מתארת את מיקומן האקראי של הגחליליות (כנקודות) בתחילתה של ריצת האלגוריתם (משמאל) ואת מיקומן בסיום ריצת האלגוריתם:





התמקדות כנגד התרחבות[עריכת קוד מקור | עריכה]
רעיון כללי[עריכת קוד מקור | עריכה]
שני המרכיבים העיקריים בכל שיטה מטה-היוריסטית הם התמקדות והתרחבות.
- התמקדות - חיפוש מקומי ממוקד בתחום שבו קיים פתרון אופטימלי מקומי. מידת התמקדות גבוהה נוטה להגדיל את קצב ההתכנסות של האלגוריתם, אך עשויה לגרום להתכנסות מקומית בלתי רצויה.
- התרחבות - חיפוש גלובלי הבוחן את כל הפתרונות האפשריים, תוך הימנעות מהתכנסות לפתרון אופטימלי מקומי. מידת התרחבות גבוהה נוטה להקטין את קצב ההתכנסות של האלגוריתם, אך מעלה משמעותית את ההסתברות למציאת אופטימום גלובלי.
אלגוריתם המחלק את פעולתו להתמקדות והתרחבות נקרא אלגוריתם חיפוש-לסירוגין. רמות ההתמקדות וההתרחבות של האלגוריתם, וכמו כן מידת האיזון בין שני המרכיבים, נקבעות על ידי מידת האקראיות וערכי הפרמטרים. יעילותו ודיוקו של האלגוריתם תלוי ביחס ההתמקדות-התרחבות :


כאשר ו- הם פרקי הזמן המנוצלים לתהליך ההתמקדות ולתהליך ההתרחבות, בהתאמה.


מציאת יחס התמקדות-התרחבות אופטימלי[עריכת קוד מקור | עריכה]
חשיבותו של יחס התמקדות-התרחבות מוביל לפיתוח המודל התאורטי הבא, עבור המקרים הדו-ממדיים והתלת-ממדיים: אלגוריתם חיפוש המתמקד במרחב פתרונות קטן בעל רדיוס הנמצא במרחב פתרונות שרדיוסו , כאשר , ניתן למידול על ידי תהליך דיפוזיבי איטי המתואר על ידי מערכת המשוואות הסטוכסטיות הדיפרנציאליות הבאות:

![{\displaystyle \left\{{\begin{matrix}D\nabla _{r}^{2}t_{1}+{\frac {1}{2\pi \tau _{a}}}\int _{0}^{2\pi }\left[t_{2}(r)-t_{1}(r)\right]d\theta +1=0\\\\u\nabla _{r}t_{2}(r)-{\frac {1}{\tau _{b}}}\left[r_{2}(r)-t_{1}(r)\right]+1=0\end{matrix}}\right.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fd76ec10ce87601c0fd4d90946a63edd92b66225)
כאשר הוא קבוע הדיפוזיה, ו- הם תוחלות הזמן שנוצלו לתהליך ההתמקדות ולתהליך ההתרחבות, בהתאמה, ו- הם תוחלות זמני ההגעה למטרה בתהליך ההתמקדות ובתהליך ההתרחבות, בהתאמה, ו- הוא קצב החיפוש הממוצע. תחת ההנחה שקצב החיפוש זהה בכל הצעדים, פרק הזמן המינימלי הדרוש לכל אחד מהשלבים הוא:





כאשר , מתקבל יחס ההתמקדות-התרחבות האופטימלי:

![{\displaystyle (1)\quad Q_{\mathrm {optimal} }={\frac {\tau _{a}}{\tau _{b}^{2}}}\approx {\frac {D}{a^{2}}}{\frac {1}{\left[2-{\frac {1}{\ln {\frac {b}{a}}}}\right]^{2}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1b2a06595a89f556ce734c9f61f5d118d46aa396)
התוצאות לעיל קבילות עבור המקרה הדו-מימדי, ושלא קיימות תוצאות כלליות עבור יותר מ-3 ממדים.
דוגמה - מציאת יחס התמקדות-התרחבות אופטימלי של הילוך איזוטרופי[עריכת קוד מקור | עריכה]
נדגים את חישוב יחס ההתמקדות-התרחבות במקרה דו-ממדי של הילוך אקראי איזוטרופי, כלומר, במצב שבו מתקיים:

כאשר הוא קבוע הדיפוזיה ו- הוא אורך הצעד של המהלך בכל איטרציה. במקרה שבו נקבל מתוצאה (1):


מכאן ניתן להסיק שבמקרה זה, יש להשקיע זמן רב יותר בשלב ההתרחבות מאשר בשלב ההתמקדות.
דוגמה - מציאת יחס התמקדות-התרחבות אופטימלי של פונקציית גל עומד[עריכת קוד מקור | עריכה]

נדגים את חישוב יחס ההתמקדות-התרחבות במקרה של פונקציית גל-עומד:
![{\displaystyle f(x)=1+\left\{\exp \left[-\sum _{i=1}^{d}\left({\frac {x_{i}}{\beta }}\right)^{10}\right]-2\exp \left[-\sum _{i=1}^{d}\left(x_{i}-\pi \right)^{2}\right]\right\}\cdot \prod _{i=1}^{d}\cos ^{2}x_{i}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2b47c6a2ffb53e5c20ec77af15a50ce279f73134)
פונקציה זו מאופיינת במספר גדול של נקודות קיצון מקומיות, ובעלת מינימום גלובלית יחידה בנקודה בתחום כאשר ו- . נקבע ש- , ומכיוון ש- , נובע ש- , ועבור נקבל:









![{\displaystyle Q_{\mathrm {optimal} }\approx {\frac {1}{2\left[2-\ln \left({\frac {b}{a}}\right)\right]^{2}}}\approx 0.19}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d0984f7dace00053a1495f87f7a70561c954c0a1)
מכאן ניתן להסיק, שבהפעלת האלגוריתם על פונקציית גל-עומד, על האלגוריתם להשקיע 80% מזמן החיפוש בהתרחבות ו- 20% מזמן החיפוש בהתמקדות, על מנת לבצע את החישוב בזמן אופטימלי.
הטבלה הבאה מתארת רצף של חמישה ניסויים, בהם מופעל אלגוריתם הגחליליות למציאת מינימום עבור פונקציית גל-עומד, כאשר , , , ו- משתנה.


![{\displaystyle x\in [-20,20]^{n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/44ca04c38259c56be093b48119d875c317ab530e)

| תוצאה |






קל להבחין שהתוצאה המדויקת ביותר מתקבלת כאשר - הבחנה אמפירית המתלכדת עם הטענה התאורטית.

הכללה לממדים גבוהים[עריכת קוד מקור | עריכה]
אלגוריתם החיפוש-לסירוגין אשר הוצע על ידי בניצ'ו אטאל עבור ממדים גבוהים יותר, מתבסס על היחסים האסימפטוטיים הבאים, המתקבלים באמצעות אקסטרפולציה:

כאשר הוא זמן החיפוש הכולל הממוצע. הודגם אמפירית כי בממדים גבוהים, אלגוריתם הגחליליות יעיל בהרבה מן האלגוריתם הנ"ל, אך לא נמצא מודל תאורטי המסביר את תוצאות הניסוי.

קביעת הפרמטרים[עריכת קוד מקור | עריכה]
מקדם האקראיות מווסת את מידת האקראיות של מהלכי הגחליליות. כיוון שהפחתה הדרגתית של מידת האקראיות תאפשר מניעה של התכנסות לאופטימום מקומי, התכנסות מהירה תתקבל עבור

כאשר ו- הוא מקדם אקראיות התחלתי. סימולציות מראות שהתכנסות יעילה במיוחד מתקבלת עבור , , , כאשר הוא סדר הגודל הממוצע של פתרונות הבעיה.
![{\displaystyle \delta \in [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ca1d306ada8a11b198887d80323562ef38257a87)


![{\displaystyle n\in [25,40]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fdde5ddb3da48f8e5f16a14c8bf5a641721f4239)


סיבוכיות זמן[עריכת קוד מקור | עריכה]
סיבוכיות האלגוריתם היא , כאשר הוא מספר האיטרציות ו- הוא מספר הגחליליות. עבור גדול יחסית, ניתן להחליף את הלולאה הכפולה בלולאה יחידה, ולמיין את מידת המשיכה של הגחליליות באמצעות אלגוריתם מיון השוואתי. במקרה זה, סיבוכיות האלגוריתם היא . בשני המקרים, הסיבוכיות ליניארית ב- .


הערכת ביצועים[עריכת קוד מקור | עריכה]
להלן מספר האיטרציות שנדרשו לפתרון בעיות אופטימיזציה עבור שלוש פונקציות מרכזיות, בטווח נתון, וכתלות במספר הממדים של הפונקציה ().
פונקציית ספירה (Sphere function)[עריכת קוד מקור | עריכה]
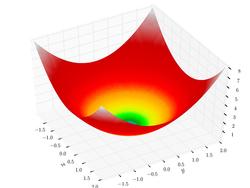
![{\displaystyle {\textrm {Sphere}}({\boldsymbol {x}})=\sum _{i=1}^{n}x_{i}^{2}\quad \quad [-100,100]^{n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5ab36512fed64b2757ed445e1f7d8e8ebd8e07d0)
| מינימום | מקסימום | |
|---|---|---|
| 15 | 6239 | 6440 |
| 30 | 6202 | 6452 |
| 60 | 6149 | 6398 |
פונקציית אקליי (Ackley function)[עריכת קוד מקור | עריכה]
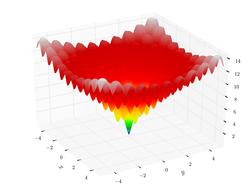
![{\displaystyle {\textrm {Ackley}}({\boldsymbol {x}})=-20\exp \left[-{\frac {1}{5}}{\sqrt {{\frac {1}{n}}\sum _{i=1}^{n}{x_{i}^{2}}}}\right]-\exp \left[{\frac {1}{n}}\sum _{i=1}^{n}{\cos(2\pi x_{i})}\right]+20+e\quad \quad [-30,30]^{n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d45e885b5d22814f8d15ea0983072a25141a3f68)
|
|
מינימום |
מקסימום |
|---|---|---|
| 15 | 1720 | 2176 |
| 30 | 1568 | 1805 |
| 60 | 1402 | 1862 |
פונקציית רוזנברוק[עריכת קוד מקור | עריכה]
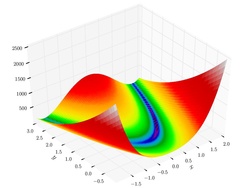
![{\displaystyle {\textrm {Rosenbrock}}({\boldsymbol {x}})=\sum _{i=1}^{n-1}\left[100\left(x_{i+1}-x_{i}^{2}\right)^{2}+\left(x_{i}-1\right)^{2}\right]\quad \quad [-30,30]^{n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3fb8e2259c03403275d3cc8acf8bc511a29f81ce)
|
|
מינימום |
מקסימום |
|---|---|---|
| 15 | 2497 | 2938 |
| 30 | 2531 | 2653 |
| 60 | 2471 | 2574 |
שימושים עיקריים[עריכת קוד מקור | עריכה]
- בעיבוד תמונה, קוונטיזצייה וקטורית המשמשת לדחיסה דיגיטלית של תמונות ורגיסטרציה של תמונות קשיחות.
- במתמטיקה, אופטימיזציית ערכים עצמיים של מערכות איזו-ספקטרליות ואופטימיזצייה פרמטרית עבור מכונת וקטורים תומכים.
- בשידור, תכנון אנטנות.
- בהנדסת מבנים, אופטימיזציית בבעיות מרובות משתנים.
- במדעי המחשב, פתרון יעיל לבעיית הסוכן הנוסע ולבעיות תחביר סמנטיות.
- בכימיה, ניתוח מצבי שיווי משקל.
- בביולוגיה, ניבוי של מבני חלבונים.
ראו גם[עריכת קוד מקור | עריכה]
לקריאה נוספת[עריכת קוד מקור | עריכה]
- Yang, X. S. (2008). Nature-Inspired Metaheuristic Algorithms. Frome: Luniver Press. ISBN 1-905986-10-6
- Yang, X. S. (2009). "Firefly algorithms for multimodal optimization". Stochastic Algorithms: Foundations and Applications, SAGA 2009. Lecture Notes in Computer Sciences 5792. pp. 169–178. arXiv:1003.1466.